Schrittmotor
Für den Betrieb der Drehscheibe kommt ein Schrittmotor zum Einsatz. Wie dies geschehen soll habe ich im Abschnitt
„Drehscheibe“ ausführlich beschrieben.
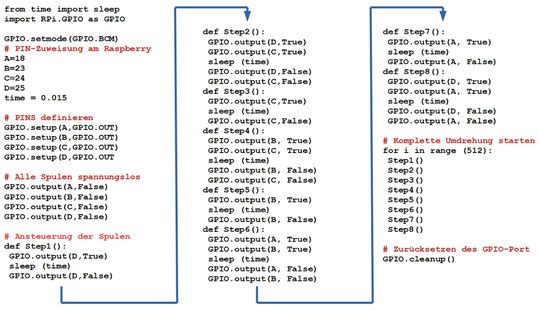
Aus einer Beschreibung zum jOY-iT Schrittmotor 28BJY-48 habe ich das nebenstehende Python-Script übernommen, um einen ersten Funktionstest des Schrittmotors vorzunehmen. Zur Ansteuerung des Motors werden also 4 GPIO-Ports benutzt.
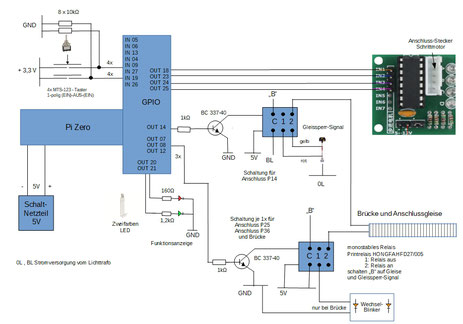
Zusätzlich werden für meine Drehscheibenlösung weitere GPIO-Port als Output bzw. als Input benötigt. Die Nutzung dieser Ports kann aus der nebenstehenden Schaltung entnommen werden. Über die zusätzlichen Output-Ports werden die Relais zur Fahrstromfreigabe an die Drehscheibenbrücke und die Anschlussgleise, sowie die Ansteuerung der Funktions-LED und des Gleissperrsignals realisiert.
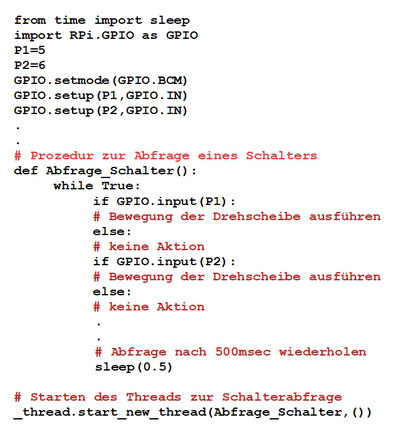
Die Input-Ports werden zur Abfrage der Positionstaster benötigt. Damit diese jederzeit betätigt werden können, ist eine permanente Abfrage dieser Ports auf logisch True (Taster ist gedrückt) erforderlich. Damit diese Abfragen neben anderen Programmen, die auf dem Raspberry laufen, erfolgen können und eine unmittelbare Reaktion auf einen Tastendruck sichergestellt ist, werden diese Abfragen als eigenständiger Thread angelegt. Threads sind Prozeduren innerhalb eines Python-Programmes, die z.B. in einer Endlosschleife laufen, den Tastendruck überwachen und ggf. die gewünschte Aktion, hier die Bewegung der Drehscheibe, auslösen.
Das Prinzip der Threads kommt z.B. auch bei der Abfrage von Lichtschranken oder das Befahren von Kontaktgleisen zum Einsatz, um ereignisorientiert den Raspberry zur Ausführung von bestimmten Aktionen zu bringen.
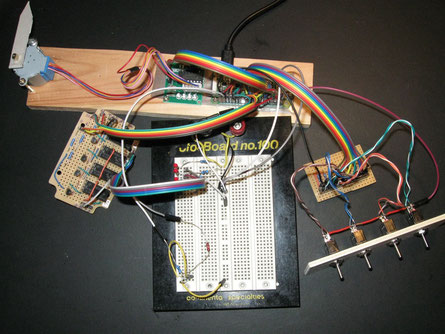
Vor dem Bau der eigentlichen Drehscheibe habe ich die Schaltung im Rahmen eines Testaufbaus erfolgreich auf Funktionsfähigkeit geprüft.
