Schiebebühne
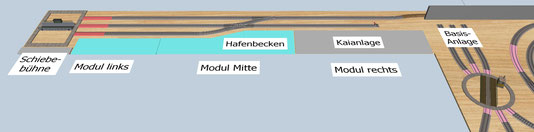
Im Rahmen der Überlegungen zur Gleisplanung III habe ich nach einer platzsparenden Lösung gesucht, die mir die Möglichkeit bietet Loks, die einen Zugverband in die Hafenanlage gezogen haben, an das andere Ende des Zugverbandes umzusetzen, damit die Wagen wieder aus der Hafenanlage gezogen werden können. Natürlich hätte ich dies über zusätzliche Weichen bzw. eine Dreiwegeweiche am Ende der Gleisstrecke realisieren können. Allerdings wäre dann für die Weiche(n) und für das erforderliche Ausziehgleis „wertvolle“ Gleislänge für meine Hafenanlage verloren gegangen. Die Lösung mittels einer Schiebebühne ist wesentlich platzsparender, zumindest dann, wenn ich wie bei der Drehscheibe auch eine auf meine Anlagenbelange in Größe und Funktion optimal zugeschnittene Eigenkonstruktion verwende.
Wie sieht nun diese Eigenkonstruktion aus?
Hier eine kurze Zusammenstellung des Lösungsansatzes und der dafür benötigten Komponenten:
- Länge der Schiebebühne ca. 22 cm
- Verwendung eines K-Gleises auf Schiebebühne
- Antrieb der Schiebebühne über einen kleinen Gleichstromgetriebe-Motor
- 8 mm Gewindestange mit passender Mutter
- Wellenkupplung zu Verbindung von Motorachse und Gewindestange
- Gabellichtschranken zur exakten Positionierung der Bühne
- Fahrstrom für die Bühne über Schleifkontakte
- Steuerung des Fahrstroms an den Anschlussgleisen zur Vermeidung von „Betriebsunfällen“
- Signalgebung an der Schiebebühne
-
Steuerung der Schiebebühne über einen weiteren Raspberry Zero

Antrieb
Bei der Suche nach einem geeigneten Motor bin ich schnell fündig geworden. Gewählt habe ich einen Gleichstrommotor G50-5V mit Metallgetriebe.
Dieser Motor kann mit Spannung zwischen 0,3 und 6 V betrieben werden. Bei 5 V hat er eine Drehzahl von 350 U/min. Die 8 mm Gewindestange weist eine Steigung von 1,25 mm/U. Der Abstand zwischen zwei benachbarten Anschlussgleisen an der Schiebebühne beträgt bei meinem Gleisplan 77,5 mm.
Aus diesen Werten ergibt sich dann, dass die Schiebebühne zum Wechsel zwischen zwei benachbarten Positionen etwa 77,5 / (350/60*1,25) ~ 10 sec benötigt. Dies erschien mir angemessen, da ja im Original Tonnen schwere Loks bewegt werden.

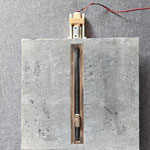
Für die Verbindung zwischen der 3 mm Motorachse und der 8 mm Gewindestange verwende ich eine passende Wellenkupplung aus Aluminium. Die auf der Gewindestange laufende M8 Messingmutter ist fest mit der Bühne verbunden und setzt somit die Motorrotationsbewegung in eine Linearbewegung um. Unterhalb der Bühne sind Schleifer angebracht, die den Fahrstrom für das Bühnengleis von den senkrecht zur Bewegungsrichtung montierten „Stützschienen“ der Bühne abgreifen.
Hier ein paar Bilder aus der Konstruktionsphase:










Steuerung
Die Positionserkennung und die Steuerung der Bewegung basiert auf drei unterhalb der Schiebebühne platzierten Gabellichtschranken. Sobald die Bühne sich exakt in Position eines Anschlussgleises befindet spricht die entsprechende Gabellichtschranke an. Sobald eine Gabellichtschranke anspricht wird die 5V-Motorspannung abgeschaltet und die Bühne verharrt in der erreichten Position. Die Gabellichtschranken sind außerdem jeweils mit einem GPIO-Pin (GPIO links, rechts, Mitte) des Raspberry Zero verbunden. Auf diese Weise kann der Raspberry Zero die Position der Bühne über die beschriebene Kommunikation-Technik an den Haupt-Raspberry übertragen. Dieser kann dann die Bühnen-Position anzeigen.
Eine Positionsveränderung der Bühne wird am Haupt-Raspberry initiiert. Dieser teilt dem Raspberry Zero die Zielposition via UDP mit. Der Zero entscheidet dann ob eine Bewegung nach links oder rechts erforderlich ist und polt ggf. die Spannungsversorgung des Getriebemotors um (GPIO_Y L/R).
Da durch die Gabellichtschranke in der aktuellen Position die Spannungsversorgung des Getriebemotors bestimmungsgemäß abgeschaltet ist, sorgt der Zero über einen kurzen Impuls an einem weiteren GPIO-Pin (GPIO_Z Start), dass der Motor kurz an Spannung gelegt wird und somit aus der Ruhelage in der gewünschten Drehrichtung loslaufen kann.
Der Raspberry Zero gibt über einen GPIO-Pin (GPIO_X Bühne) den Fahrstrom für das Bühnengleis frei, wenn die Bühne in der Zielposition steht.
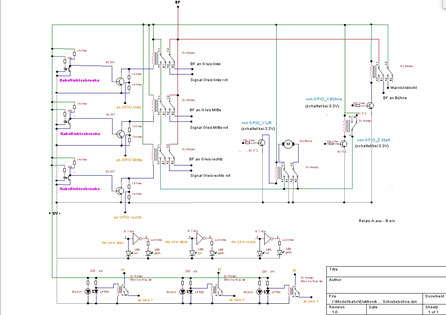
Die insgesamt erforderliche Schaltung meiner Schiebebühnen-Steuerung ist im nebenstehenden Bild dargestellt. Dort ist auch zu erkennen, wie die Signale vor der Schiebebühne angesteuert und der Fahrstrom an den Anschlussgleisen zu- bzw. abgeschaltet werden.
Betriebskonzept
Zunächst hatte ich nur an dem letzten geraden Gleisstücken (C-Gleis 24188) vor der Schiebebühne den Fahrstrom zu- bzw. abgeschaltet. So war zwar verhindert, dass eine ziehende Lok in die Schiebebühnen-Mulde gesteuert werden konnte. Hat eine Lok aber einen Zugverband rückwärts zu weit Richtung Schiebebühne gedrückt, war der Betriebsunfall nicht zu vermeiden. Daher habe ich das Betriebskonzept modifiziert.
Ich schalte nun an den gesamten geraden Gleisen eines Anschlussgleises bis zu den Weichen den Fahrstrom über die Bühnensteuerung zu (wenn Signal auf grün) und ab (wenn Signal auf rot). Zusätzlich erhält jedes Anschlussgleis eine weitere additive Fahrstromeinspeisung, die allerdings nur solange aufrecht erhalten wird wie kein Fahrzeug die Lichtschranke kurz vor der Schiebebühne blockiert. So wird sichergestellt dass sich, egal ob eine Lok den Zugverband zieht oder schiebt, kein Fahrzeug in die Schiebebühnenmulde bewegt. Auch diese zusätzlichen Lichtschranken sind unten im dargestellten Schaltplan enthalten.
Anmerkung: Meine ESU-Lok KG230 besitzt einen Puffer-Kondensator. Dies führt dazu, das die Lok auch bei abgeschaltetem Fahrstrom noch ein Stück weiter fährt. In der Regel reicht aber das verbliebene Stück Gleis vor der Schiebebühne aus, dass ein Betriebsunfall vermieden wird.
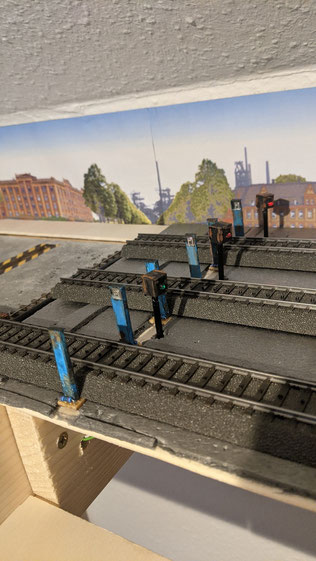
Hier noch ein paar Bilder aus der Bauphase des "Schiebebühnen-Projekts".
Ein YouTube-Video zu meiner Schiebebühne findet ihr hier.








