Drehscheibe
Durch die Erweiterung meiner Modellbahnanlage um ein kleines Bahnbetriebswerk (BBW) sollte meine Anlage eine zusätzliche Attraktivität erhalten. Allerdings wollte ich meine ursprünglich angelegte Anlagengröße nicht wesentlich ausdehnen. Daher musste ich die wesentlichen Bestandteile meines BBW (Drehscheibe, Lokschuppen, Bekohlung, Wasserkran) auf einer schmalen 35x100 cm großen Anbauplatte am linken Anlagenrand ergänzen. Die erforderliche Anpassungen des Gleisplanes habe ich bereits im Abschnitt Gleisplanung II beschrieben.
Bei einer Breite dieser Anbauplatte von nur 35 cm konnte ich keine handelsübliche Märklin-Drehscheibe verwenden. Auch ein drei-ständiger Ringlokschuppen hätte hier keinen ausreichenden Platz gefunden. Ich war dann mutig und habe mich für den Selbstbau einer Drehscheibe und den Entwurf eines drei-ständigen Lokschuppen mit parallelen Gleisen entschlossen.
Ich will euch hier nicht mit Beschreibungen meiner diversen im Endeffekt dann aber doch verworfenen Konstruktionsüberlegungen langweilen. Viele Konstruktionsvorschläge, die im Internet zu finden waren, haben mechanische Bearbeitungswerkszeuge und Fähigkeiten vorausgesetzt, die bei mir nicht vorhanden sind.
Ich fasse hier zunächst einmal die wesentlichen Merkmale meiner Lösung zusammen:
- Länge der Drehscheibenbrücke ca. 24 cm
- Verwendung von Standard-Gleismaterial für Brücke und Anschlussgleise
- Antrieb der Drehscheibe durch einen kleinen Schrittmotor
- Winkelgenaue Steuerung der Drehscheibe über einen Raspberry
- Bedienung der Drehscheibe über Kipptaster
- Fahrstrom für die Drehscheibenbrücke über Schleifkontakte
- Freigabe des Fahrstroms an den Anschlussgleisen zur Vermeidung von „Betriebsunfällen“
- Signalgebung an der Drehscheibe

Warum eine Lösung auf Basis eines Schrittmotors?
Bei Wikipedia findet man die folgende Definition für einen Schrittmotor:
„Ein Schrittmotor ist ein Synchronmotor, bei dem der Rotor (ein drehbares Motorteil mit Welle) durch ein gesteuertes, schrittweise rotierendes, elektromagnetisches Feld der Statorspulen (Stator = nicht drehbarer Motorteil) um einen kleinen Winkel (Schritt) oder sein Vielfaches gedreht werden kann.“
Und das ist genau die Funktion, die ich für die Drehscheibe benötige. Eine allgemeine Funktionsbeschreibung für einen solchen Motor findet man in der weiter unten verlinkten Beschreibung.
Schrittmotorauswahl
Also habe ich mich zunächst auf die Suche nach einem geeigneten kompakten Schrittmotor gemacht. Gefunden habe ich das Modell 28BYJ-48 (5VDC), das man inkl. einer Ansteuerungselektronik zum direkten Anschluss an den GPIO-Port eines Raspberry für ca. 5 € im Elektronikhandel erwerben kann.
Bei diesem Motor wird das rotierende, elektromagnetische Feld in 8 Steps, bei denen dann die kleinen Elektromagnete in definierter Reihenfolge aktiviert werden, umgesetzt. Je nachdem in welcher Reihenfolge die 8 Steps (ich nenne diese mal Zyklus) durch den Raspberry ausgeführt werden, dreht sich der Motor im oder gegen den Uhrzeigersinn. Dabei bewegt sich die Welle des Motors um einen Winkel von 0,703125° weiter. Man benötigt also 512 Zyklen für eine 360°-Drehung.
Wie der ausgewählte Schrittmotor konkret am Raspberry betrieben werden kann ist in dieser Beschreibung sehr schön beschrieben.
Position der Anschlussgleise
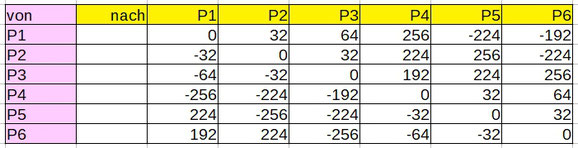
Nach der Festlegung auf diesen Schrittmotor konnte ich mir dann überlegen, in welchem Abstand bzw. Winkel die Anschlussgleise an der Drehscheibe anzuordnen waren. Bei der schließlich von mir festgelegten Anordnung liegt zwischen den benachbarten Anschlussgleisen jeweils ein Winkel von 22,5°, was genau 32 Zyklen entspricht.
In der Tabelle sind die erforderlichen Zyklen für den Wechsel von einer Position in eine beliebig andere Position der Drehscheibe aufgeführt. Bei einer positiven Anzahl dreht sich die Drehscheibe in und bei einer negativen Anzahl gegen den Uhrzeigersinn.
Gleisbau
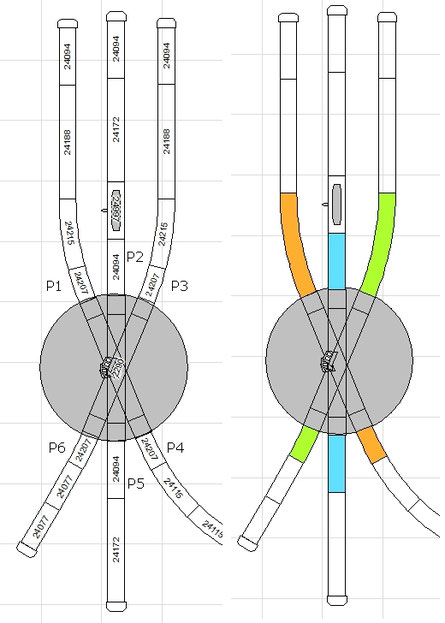
Ein weiterer Vorteil dieser Festlegung auf 22,5° sah ich ursprünglich darin, dass ich mit Standard Märklin-Gleisen den skizzierten Gleisplan realisieren konnte. In der Bauphase habe ich es mir dann aber noch etwas leichter gemacht. Da die am Ende eines C-Gleises herausragenden elektrischen und mechanischen Steckkontakte ohnehin am offenen Ende des Anschlussgleises hätten entfernt werden müssen, habe ich jeweils ein Gleis 24230 (30°) in ein 22,5°- und ein 7,5°-Winkelstück geteilt. So konnte ich die Anschlussgleise P1/P4 und P3/P6 sehr einfach im richtigen Winkel anlegen. Auch die Enden der Anschlussgleise P2 und P5 sind durch Teilung eines C-Gleises 24188 entstanden. Die Verwendung von C-Gleismaterial auf der Drehscheibenbrücke hätten wegen des Schotterbetts sicher nicht sehr vorbildgetreu gewirkt. Daher kommt hier K-Gleismaterial zum Einsatz.

Bedienung der Drehscheibe
Über 4 Zweiwege-Kipptaster, die vorne an der Erweiterungsplatte angebracht sind, sollen die 6 Positionen der Drehscheibe angewählt werden können. Sobald einer dieser Taster benutzt wird errechnet der Raspberry entsprechend der obigen Tabelle die Anzahl der erforderlichen Zyklen bzw. die Drehrichtung und führt die Drehung aus.
Die Drehgeschwindigkeit konnte ich im Raspberry dadurch vorbildgetreu einstellen, dass ich zwischen den 8 Steps eines Zyklus jeweils eine Pausenzeit von 15 ms eingefügt habe. Eine 180°-Drehung benötigt so ungefähr 30 Sekunden.
Es stellte sich aber heraus, dass beim Wechsel der Drehrichtung ein gewisses Spiel im Antrieb des Schrittmotors auftritt. Dies führte dazu, dass die Drehscheibe nach einem Richtungswechsel etwas zu kurz lief, so dass die Brücke und das gewünschte Anschlussgleis nicht exakt voreinander standen. Die Ursache für dieses Spiel liegt in dem innerhalb des Schrittmotors verbauten kleinen Getriebe aus Plastik-Zahnrädern. Das Getriebe bewirkt, dass die Achse des Schrittmotors bei diesem Modell 64 Umdrehungen des Motorrotors benötigt, um sich einmal um 360° zu drehen. Gelöst habe ich das Problem dadurch, dass ich bei einem Richtungswechsel die Anzahl der Zyklen aus der Tabelle um 3 Zyklen erhöht habe.
Justierung der Drehscheibe
Wird der ganz rechte Taster (links/rechts) betätigt, wechselt der Raspberry in den Justierungs-Modus. Bei jeder weiteren bzw. anhaltenden Betätigung dieses Tasters bewegt sich die Drehscheibe um den kleinst möglichen Winkel (0,703125°) in bzw. gegen den Uhrzeigersinn. So kann ich die Drehscheibenbrücke exakt auf ein Anschlussgleis ausrichten. Ist die gewünschte Position erreicht wird dem Raspberry durch Betätigen eines der Taster P1 bis P6 mitgeteilt, an welchem Anschlussgleis das schmale Ende der Brücke anliegt. Die Justierung ist mit diesem Tastendruck beendet.
Betriebskonzept
Um zu verhindern, dass eine Lok in die Drehscheibenmulde stürzt, wird der Fahrstrom nur auf den Anschlussgleisen
freigegeben, die durch die Drehscheibenbrücke miteinander verbunden sind. Auf der Drehscheibenbrücke wird der Fahrstrom nur freigegeben, wenn die Positionierung der Drehscheibe abgeschlossen ist.
Während der Justierung der Drehscheibe wird auf allen Anschlussgleisen und der Brücke der Fahrstrom gesperrt. Außerdem habe ich neben der Drehscheibe ein orangefarbenes Wechselblinklicht
platziert, das bei Bewegung der Brücke eingeschaltet wird.
Durch eine Zweifarben-LED (verbaut in einem Wartengebäude) wird der Zustand der Drehscheibe signalisiert (grün: freigegeben, rot: gesperrt). Außerdem ist am Anschlussgleis P4 ein Gleissperrsignal zur Freigabe bzw. Sperre der Drehscheiben-Einfahrt verbaut. Damit die Drehscheibe-Funktion unmittelbar noch dem Einschalten der Anlage verfügbar ist, wird der jeweils letzte Drehscheibenzustand auf dem Raspberry gespeichert und beim Neustart wieder eingelesen.
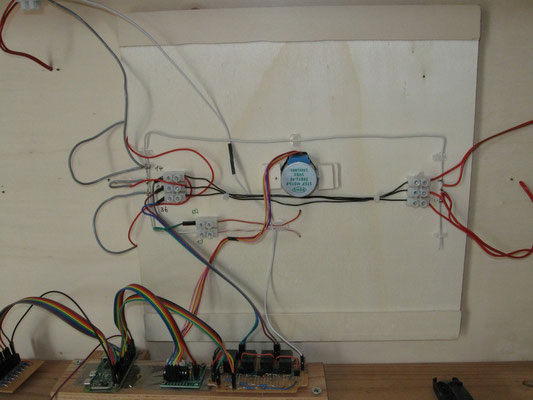
Da der Anschluss der Ansteuerungsplatine des Schrittmotors, die Steuerung der Relais im Zusammenhang mit dem
Betriebskonzept und die Anbindung der Positionstaster einen freien Zugang zum GPIO-Port des Raspberry erforderten, habe ich für die Drehscheibe einen zusätzlichen RaspberryZero eingesetzt.
Details zum Betrieb der Drehscheibe bzw. eines Schrittmotors aus Sicht des Raspberry beschreibe ich im Abschnitt Schrittmotor.

Mechanische Aufbau
Dieser ist relativ unspektakulär. Ein kreisrundes Loch in die Sperrholzplatte gesägt, ein quadratisches Brett als Boden für die Drehscheibenmulde gefertigt, Befestigung des Schrittmotors an der Bodenplatte, Aufkleben der Kupferringe zur Zuführung des Fahrstroms an die Brücke, Befestigung der Brücke über einen Flansch an der Welle des Schrittmotors und Verbauen von Schleifkontakten unterhalb der Brücke zur Verbindung der Kupferringe mit dem Brückengleis … fertig.
Nebenbei bemerkt:
Der auf dem Boden der Drehscheibemulde verlegte Rokuhan Z-Gleis-Kreis sollte ursprünglich über kleine 1:220 Drehgestelle, die ich unter der Brücke montieren wollte, den Fahrstrom für die Brücke bereitstellen. Ich bin dann aber zu der einfacheren oben beschriebenen Variante gekommen. Den Gleiskreis habe ich allerdings erhalten. Hierauf stützen sich heute unter den Brückenköpfen angebrachte kleine Stützen ab, die ein Kippeln der Brücke beim Befahren mit schwereren Loks verhindern. Außerdem bildet er das in Drehscheiben vorhandene Laufgleis nach.



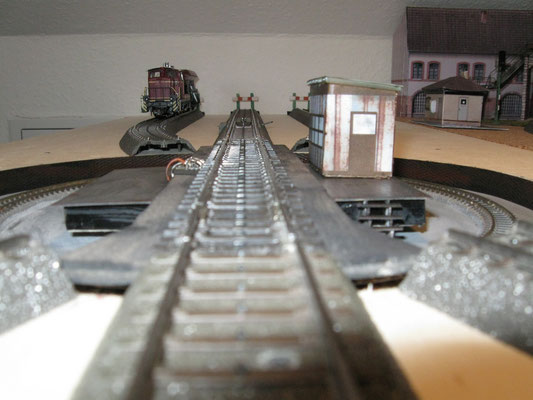

Abschließend noch die Gestaltung und fertig ist meine selbstentworfene Drehscheibe.
Nun ja, am Ende sind dann doch noch ein paar Aspekte aufgetreten, die nach einer Nachbearbeitung riefen:
Die Bedienung der Drehscheibe über den „Haupt-Raspberry“ mit Display wäre
schön.
Die Drehscheibe ist stumm, Betriebsgeräusche und Ansagetexte wären nett.
Meine Lösungen hierzu habe ich im Abschnitt Kommunikation beschrieben.
Wenn die Justierung nicht exakt ist, kommt es gelegentlich zum Entgleisen
einer Lok. Hier muss ich mir noch Gedanken zu einem sicheren Entgleisschutz machen.
Zu diesen Aspekten später mehr.
Ein YouTube-Video zu meiner Drehscheibe findet ihr hier.

